|
rt =- 41.3374
.3313 +14.9383i
.3313 -14.9383i
Вещественные части корней уравнения имеют отрицательный знак, следовательно, система устойчива.
Для оценки управляемости системы построим матрицу управляемости R:

Вводим матрицу A:
>> a=[0 1 0; 0 0 1; -100/0.01 -6/0.01 -0.5/0.01]
Вводим матрицу B:
>> b=[0; 0; 1/0.01]
Находим матрицу управляемости:
>> r=[b a*b a*a*b]
Ранг матрицы управляемости:
>> rg=rank(r)g = 3
Ранг матрицы управляемости равен n, следовательно, система управляема.
Для оценки наблюдаемости системы построим матрицу наблюдаемости Q:

Транспонируем матрицу A:
>> at=a'
Вводим матрицу C:
>> c=[1 0 0]
Транспонируем матрицу C:
>> ct=c'
Определяем матрицу наблюдаемости:
>> q=[ct at*ct at*at*ct]
Определяем ранг матрицы наблюдаемости:
>> rg=rank(q)
rg = 3
Ранг матрицы наблюдаемости равен n, следовательно, система наблюдаема.
. Построить графики АЧХ, ФЧХ, АФЧХ, переходной характеристики
Для построения частотных характеристик используем MatLab.
Введем передаточную функцию
>> w=tf([40 100], [0.01 0.5 6 150])
Transfer function:
40 s + 100-0.01 s^3 + 0.5 s^2 + 6 s + 150
Для построения АЧХ, ФЧХ используем команду bode:
>> bode(w)
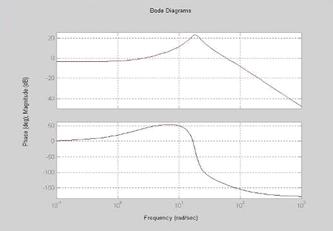
Рис. 1. ЛАЧХ, ЛФЧХ
График АФЧХ строится по передаточной функции командой nyquist.
>>
nyquist(w)
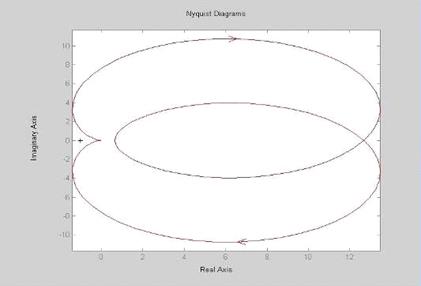
Рис. 2. Годограф АФЧХ
Переходную характеристику построим с помощью команды step:
>>step(w)
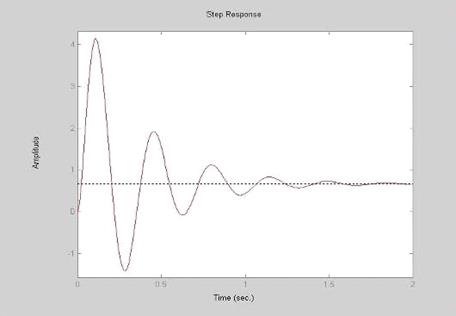
Рис. 3. График переходной характеристики.
По графику переходной характеристики определим время переходного процесса - 1.7 сек.
|